MCR n° 402 |
Ajout de l'autopilote | |||||
Evolutions apportées Autopilote
|
L'installation de l'autopilote s'est donc
limitée à deux phases :  Servo
et bielle MGL Servo
et bielle MGLOn positionne un servo de tangage sur la commande de profondeur et un servo de roulis sur la commande des ailerons. Il n'est pas nécessaire d'avoir un servo de direction : l'appareil est stable en lacet et les virages s'effectuent jusqu'à 30° d'inclinaison environ, sans l'action des palonniers. On a préalablement modélisé le montage des servomoteurs : il faut prévoir un support adapté à chaque servo, ainsi qu'une bride et une bielle pour la liaison avec les commandes. 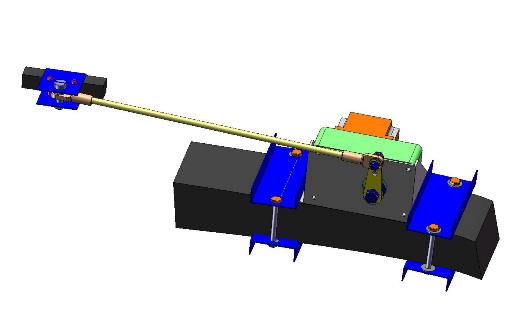 Servo aileron-modélisation Le
servo de profondeur est positionné
derrière le coffre à bagage, pour
actionner le tube
de commande de la gouverne de profondeur.
Il est fixé sur le plancher à
proximité
de l'antenne VHF ; un renfort du
plancher par une stratification carbone, est ajoutée. 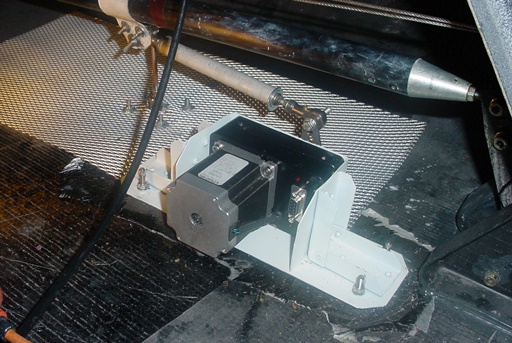 Sevo de porfondeur installé Le
servo d'aileron est installé sous le siège droit,
au dessus de la
lame de train. Ce servo agit sur la barre de renvoi
d’aileron du combiné
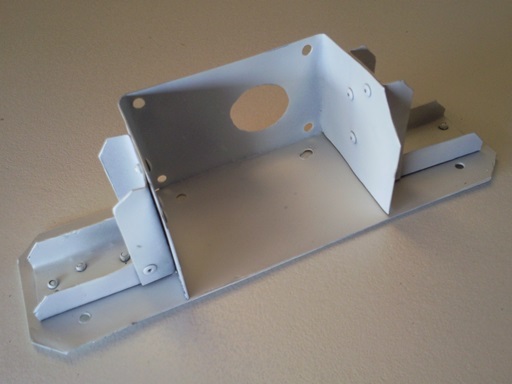
manche. 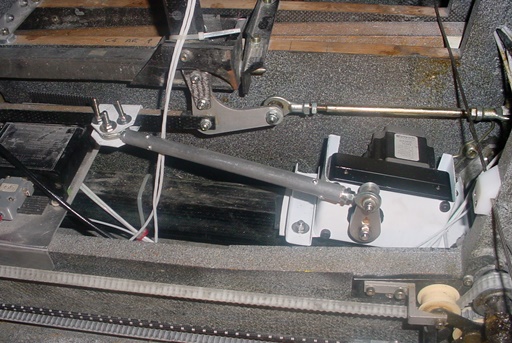 Servo d'ailerons installé Les
servos sont immobilisés sur des
platines adaptées, réalisées en tole
d'aluminium
riveté et fixées : Un
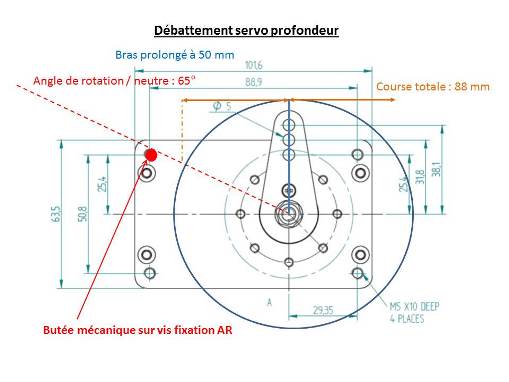
point crucial concerne les longueurs
des bras des servos qui doivent etre strictement adaptés au
débattement des commandes.  Bras de servo prolongé Le cablage électrique a été prévu à la conception du tableau de bord : - un breaker dédié uniquement aux servos sur le bus avionique - un bouton de désactivation rapide du pilote automatique - un circuit de puissance pour les servos (1,7 A en pointe - 0,9 A en maintien) - une prolongation du bus CAN pour la commande des servos par l'EFIS Le bouton poussoir de désativation rapide comporte une led jaune allumée quand les servos sont sous tension, indépendamment de l'affichage du statut de l'autopilote sur l'EFIS. Il est positionné sur le tableau de bord. La masse totale des servos montés et du cablage est de 3,6 kg. Le servo de profondeur est placé en arrière de la cellule : le centre de gravité recule de 20 mm et l'impact en centrage arrière est de 2% Phase de configuration et tests La mise en service nécessite dans l'EFIS la mémorisation de la course de chaque servo et des paramètres de fonctionnement appliqués à chacun d'eux Extraits du paramétrage : [5] Bank
control setup => paramétrage
du servo
d’aileron
[1] Target rate of
turn:
2.0°/second
[1] Low ASI, Force nose
lower: L'EFIS dispose d'une fonction de test de l'autopilote au sol qui permet de vérifier le fonctionnement des servos par rapport aux commandes ; ce tets est ajouté à la checklist de décollage L'EFIS MGL permet d'avoir 9 écrans d'affichage personnalisables : on y a ajouté des informations de fonctionnement de l'autopilote, et sur l'un deux, l'indication des efforts des servos en fonctionnement (cela a servi à affiner le paramétrage pour un fonctionnement quasi insensible de l'autopilote). En vol il y a plusieurs modes d'utilisation de l'autopilote qui vont de "voler droit en gardant le cap" jusqu'au suivi complet de route (mode RNAV) avec simulation d'approche ILS. Les alertes éventuelles sont à la foi visuelles et auditives : il n'est pas nécessaire de regarder l'écran. Un des avantages de la solution MGL Avionics, est qu'il y a un simulateur -gratuit- sur PC qui permet de s'entrainer à l'autopilote. On a couplé le simulateur MGL avec le simulateur de vol MS X, incluant l'appareil MCR. C'est un facteur de sécurité incontournable. En vol L'autopilote apporte un confort indéniable qui permet de se libérer de l'action de pilotage, pour consacrer plus de temps à la sécurité extérieure, à la navigation, aux échanges avec le controle, voire de traverser une zone de faible visibilité, sans risque. Voici l'écran d'une approche ILS simulée en vol réel : la route active du GPS est calée vers le point (virtuel) d'interception du localizer de la piste choisie sur l'aérodrome de destination. L'autopilote en fonctionnement amène l'appareil vers ce point. Il faut seulement controler l'altitude de vol pour l'autopilote par le bouton rotatif.  Autopilote vers point d'intercept virtuel A l'arrivée au point d'interception (virtuel) de l'ILS, l'autopilote prend le cap de la piste. L'EFIS affiche le message "ILS intercepted" qui est repris sur le mode de fonctionnement en bas à gauge de l'indicateur HSI, et les aiguilles en bleu permettent de controler le suivi d'axe. Il faut gérer manuellement l'altitude par le bouton rotatif, pour être dans le plan d'approche.  Autopilote dans le glide En pratique on désactive l'autopilote après le passage du midle marker virtuel : cela laisse une marge pour affiner l'approche manuellement. Même avec un autopilote en fonction, il faut gérer la check-list d'approche et la vitesse ! (Voir la suite) (Retour Accueil) |
A
noter .............................. On a choisi la puissance du servo-moteur adaptée aux efforts sur les commandes : couple de 4,8 Nm Si les bras des servos ont une course de près de 180° on a un blocage irréservible des commandes Ultérieurement, on a "encapsulé" la barre de renvoi du combiné manches dans un profilé carré en aluminium, en raison d'un risque de flambage de cette pièce Il est indispensable de s'entrainer sur simulateur à l'utilisation d'un pilote automatique L'indicateur HSI peut etre orienté soit au nord, soit au cap de l'appareil (comme ici) Couleurs des flèches du HSI : -rose = GPS ou -jaune = compas -bleu = ILS On peut se trouver décalé au début sur l'axe d'approche soit parce que l'autopilote gère la dérive soit parce que lors de l'arrivée sur le localizer virtuel, l'autopilote engage un virage qui peut etre important et qui dépasse l'axe. |
||||